-

GAMEPOD.hu
Arduino hardverrel és szoftverrel foglakozó téma. Minden mikrovezérlő ami arduinoval programozható, és minden arduino program, board, és hardverrel kapcsolatos kérdések helye.

Új hozzászólás Aktív témák
-
#11722
 tonermagus
aktív tag
Aryes
#11721
tonermagus
aktív tag
Aryes
#11721
tonermagus
aktív tag
Na ezt megpróbálom.
Egyébként most kicsit aggódom, mert utánaolvastam a dolgoknak. Azt még nem mondtam hogy egy ilyen 12V-os 775-ös motort szeretnék meghajtani az L298N-el, vagy hasonló társaival. A gond az hogy ezek a H-hidak 2A-t tudnak max, ezeknek a motoroknak az áramfelvétele üresjáratban kb ennyi. Gondolom terhelés alatt ez jelentősen megnő és tuti átlépem a 2A-os küszöböt amit a H-híd tud, sőt egy videó alapján terheléskor egy ilyen motor akár 24A-t is felvehet. Ezzel tuti kinyírom a vezérlőt, ugye?
Most már értem miért kell ESC az RC hajók vezérléséhez. Azok akár 60A-t is elbírnak.
Tudtok esetleg olyan H-hidat ami elbírja egy ekkora teljesítményű motor áramfelvételét?
-

Teasüti
nagyúr
Mert nem lemásolni szeretném az egyik csatornát, hanem két független csatornát - amin akár két eltérő kitöltési tényezőt is futhat - szeretnék ellentétes fázisban üzemeltetni. Az inverzet csak az könnyebb megérthetőség miatt hoztam fel. A cél sokkal inkább az volna, hogy a tápot időben egyenletesebben tudjam terhelni.
(#11746) Gergosz2
Köszi!
Egy gyors magyarázatot is kérhetnék?
Gondolom a 127U az az 50%-os kitöltési tényező lesz, és a magic a TCCR regiszterekben keresendő.
Milyen képet mutat a logic analizer más kitöltésnél? Mondjuk 25%-on? A célom az volna, hogy minél kevésbé rángassa meg a tápot, mert az meg nem tudja szabályozni a kimenetét és alkalmanként némi vibrálást követően le is kapcsol. Próbáltam default-nál (~500 Hz) gyorsabban is hajtani, de ez nem oldotta meg a gondot, ellenben csúnyán elkezdett forrósodni a pwm meghajtó.[ Szerkesztve ]
-
-

Janos250
őstag
FT232RL
Jumperrel állítható, hogy 3.3, vagy 5V.
300 Ft: link"Esetleg belföldről, hogy ne kelljen rá 2 hónapot várnom? "
Ha feljössz érte Pestre, adok kölcsön, de postára nincs időm mászkálni.Az amerikaiak $ milliókért fejlesztettek golyóstollat űrbéli használatra. Az oroszok ceruzát használnak. Én meg arduinot.
-

_q
addikt
-
Janos250
őstag
Igen, ugyanaz, csak az itthoni négyszeres áron (1200 Ft) van postaköltség nélkül, mint a linkelt postával együtt (300 Ft). Igen, azokat állítja. Hogyan? Azt pontosan nem tudom, engem csak addig érdekelt, hogy működik.
Aztán van még pár másik csippel szerelt is, azok is működnek, ha jó drivert használ hozzá az ember. Ez nem is mindig olyan egyszerű, ha működőt akarsz, de vírust se akarsz benne.Az amerikaiak $ milliókért fejlesztettek golyóstollat űrbéli használatra. Az oroszok ceruzát használnak. Én meg arduinot.
-
Akkor még 1 kérdés, nrf24l01 rádiós modulból milyet és honnan érdemes venni? Szeretném kipróbálni egy projektben, de annyi féle változatot találok, hogy azt se tudom, mi micsoda. Az adapter board az például micsoda, és mihez van rá szükség? Anélkül nem is lehet használni a modult? Köszi
-
_q
addikt
Rádiófrekvencián küldi az adatokat LORA protokoll szerint. 2.4 GHz esetén a wifi hálózat esetleg zavarhat, de ez meg ugye nem azon a frekvencián sugároz (EU 868 MHz).
Ha minden igaz elég nagy távolságokat el lehet kommunikációban érni vele. Még én se próbáltam és igaz kicsit drágább is mint az nrf24l01.[ Szerkesztve ]
-

Tankblock
aktív tag
Én nem szenvedék ezzel, használj portmanipulálást az 1-2 ciklusidő és nem oszt nem szoroz.
Adj inkább időt a delayhez....Vagy mérd meg scoppal....
Ugye nem külső osszcillátorról hajtod? mert akkor az nem is lesz annyira pontos, de az IR nem is kell annyira ha jól emlékszem, nagyon toleráns...
Release the Beast....
-
#11805
tonermagus
aktív tag
Aryes
#11804
tonermagus
aktív tag
Köszi a tippet, ezeket mindenképpen megpróbálom.
Bár az is eléggé aggaszt, hogy volt olyan, hogy elsétáltam 25 méterre a céltól. vártam picit, majd elindultam vissza... szépen számolt egészen 15m-ig, majd miközben ugyan olyan sebességgel haladtam visszafele elkezdett felfele számolni 40-50-ig, majd mikor megálltam a célnál rá pár másodpercre kezdett el csökkenni ismét, és kb. 20sec után talált vissza a ~4-5m-es távolságra
-
Teasüti
nagyúr
Igen. Van egy a madárban, meg egy a telefonban. Legalábbis a komolyabbak a telefont/tabletet használják interfésznek.
Az egyszerűbb, nem autonóm drónoknál ez nem szempont, mert nincs bennük autópilóta.Amúgy azt megfigyeltem már, hogy nem mindig pontos a visszatérés: előfordul, hogy két méterrel a helipad mellett akar leszállni. De csak most ebből a beszélgetésből esett le, hogy lehet nem kéne mozognia a vezérlőnek és akkor nem borul a relatív koordináta rendszer. De igazából csak találgatok, fogalmam sincs hogy működik.

Csak eddig sehogy se tudtam magyarázni mi nem sikerült neki ilyenkor.
De precíziós (kamerával segített) leszállás nélkül se téved 2-3 métereket, szóval biztos van benne vmi turpisság. Nem hinném, hogy a madár értékének a felét csak a gps vevő tenné ki. Sőt, nagy összegben mernék fogadni rá, hogy kommersz vevő van benne ugyanúgy, mint bármely naviban.[ Szerkesztve ]
-
-
-
-

zsolti_20
senior tag
Ugy dontottem inkabb cserelem a modult. De ahogy latom a kovetkezo lepcsofok csak az arduino mega?
Igy legalabb bele fer egy oled kijelzo is az aksi kapacitas meresehez.
Javasoltak hogy toroljem a bootloadert ezzrl felszabatitva 1-2kb-ot de akkor meg specialisan tudnam csak programozni. -

DigitXT
félisten
Egy Uno készlettel kezdtem. Végig vacakoltam a hétszegmenses/LCD kört,
aztán megváltás volt a 320x240-es színes kijelző, sokkal több infó elfér...
(Nyilván az Unora is lehet rendes LCD-t kötni, de nekem az már túl barkács,
nem lehet megúszni, hogy az ember fixre építse vmi műszer dobozba, stb.)Ha nem modulokat veszel, az M5stack se LEGO, ugyanúgy drótokkal megy.
Csak az alapokat nem kell dobozolni, és még egy pici akku is jár hozzá...
Legutóbbi projekt, roller gyors-diagnosztika. Abszolút el lehet játszani vele:
Tavaly a mérlegem vezérlését írtam meg rá, ez is DIY, 5 kg load cell, HX711:

-
zsolti_20
senior tag
A 330ohm ötlete innen jött:
[link]De közben sikerült megoldanom. Az RFID olvasó SS_PIN a D53-ra kell mennie, az SD kátyának pedig a D4-re.
Abból következtettem ezt ki, hogy az UNO 10-es lába az SS. Szóval a nanonál is annak kell lennie. És mivel a másik modullal hibátlanul működött, ezért gondoltam elég a mega SS-re csatlakoztatni a PIN-t és valóban elég volt. Még az a két sor sem kell amiről fentebb beszéltünk. Sőt a forráskód sem a hiba beazonosításához.
[ Szerkesztve ]
-
#11953
tonermagus
aktív tag
Aryes
#11952
tonermagus
aktív tag
Köszi, a közös test tényleg megoldotta a problémát
De ha már itt tartunk azt el tudná valaki magyarázni, hogy miért kell a közös test?
Laikusként számomra ez két külön áramkör, amit csak a SIGNAL kábel köt össze. Azt gondolnám ,hogy a ledszalag megkapja a tápot, a signal kábelen amúgy is csak adat van... -
#11957
tonermagus
aktív tag
Aryes
#11956
tonermagus
aktív tag
Nagyon szépen köszönöm a leírásokat!
Akkor most a konkrét kapcsolás: (bocsi, munkaidőben vagyok, erre futotta )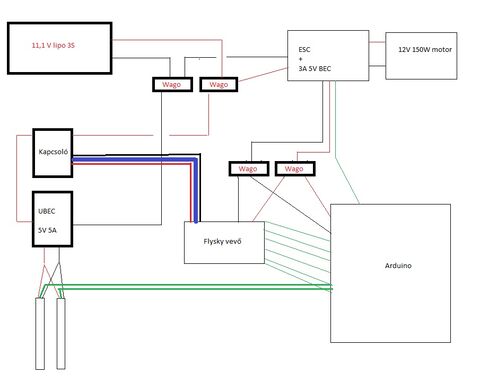
Bocsánat, elsőre nagyon kusza lehet (sokadjára is) a lényeg:
- A betáp egy 11,1V-os 3 cellás lipo 20C kisütéssel
- A lipo kábeleit Wago féle kapoccsal kettéosztom.
Bal oldali ág:
A fázis egy kapcsolóhoz megy, ami a másik ág vevőjéről kapja a vezérlést (Távirányítóról akarom kapcsolni az alsó ágat)
- A kapcsolóból továbbmegy egy UBEC-hez, ami a bejövő 11,1V-ot átalakítja 5V-ra.
- Erről az UBEC-ről kapja a tápot a 2db LED szalag (5V-os címezhető LED szalag).
- A led szalag vezérlése pedig a másik ág Arduinojáról érzekik.
Jobb oldali ág:
A wago féle kapcsolóból kapja a 11,1V-ot az ESC+BEC. Ez vezérli a motort, illetve a BEC ágán keresztül (ami szintén 11,1V-ról 5V-ra alakít) kettéosztva megy az Arduinohoz és a Flysky vevőhöz. Ennek egy csatornájára van rákötve a másik ág kapcsolója. Az arduino pedig a beérkezett jelek alapján vezérli a LED szalagot. Magától értetődő hogy a bal oldali ág csak akkor lehet áram alatt ha a jobb oldali ág is áram alatt van hiszen innen kapja a kapcsoló a jelet.
Kérdés: hova kössem az arduból a GND-t a másik ágban hogy működjön a LED vezérlés? UBEC után- LED elé tegyek be egy WAGO-t, és ott közösítsem?
Egyébként meg ez a kapcsolás jó? Leéghet valami?
Mellékág, egyáltalán nem fontos, csak hogy értsétek:
Hogy a kapcsolót miért a másik ágon lvő vevőről vezérlem?
1 kapcsoló lehet csak az egész áramkörben ami az ESC-be beépített kapcsoló lesz. A másik LED-es ágat is szakítani akarom, de mivel 1 kapcsoló lehet az nem jöhet szóba, közvetlenül a lipo után meg nem építhetek be kapcsolót, mert nem nagyon van olyan, ami elbír 20-30 ampert és esztétikus -
zsolti_20
senior tag
Csak úgy akar működni, ha a nano és az RF modul nincs a próbanyákba forrasztva.
Most legyártok hozzá egy PCB-t EasyEDA-ban, aztán meglátjuk, hogy működik vagy sem. 3 különböző modullal és 3 különböző próbanyákkal próbáltam és mindig ugyan az a gond.
Elég furcsa az is, hogy a GND-VCC közé kell egy 100uf-es elko és csak úgy működik ha az felfelé áll. Ha fektetve forrasztom be, akkor nem kapja meg a jelet. -

Johnny_vT
senior tag
Az Arduino az RX5808 vevőt mozgatja, a jeltovabbitast lehetővé tevő BT/Wifi modul csak hab a tortán, ha az ember nem akar ott ülni egy USB-kábellel. A linkelt oldalon van egy nagyon egyszerű (még nekem is érthető) kapcsolási rajz, azt összedobom 'oszt jóvan. Elég változatos helyeken repülünk (mező, erdő, mélygarázs, pláza, bánya, stb...), ezért mindenképp robusztus megoldásra hajlok. But first, tesztelni, tesztelni és tesztelni.
- És te hogy neveznél egy baromi gyors, apró, kék izét...?
-
zsolti_20
senior tag
A legutolsó javaslat lesz a megfelelő, mert a tp4056 egyszerűen már nem fér el.
Csak simán építsem be a boost-buck converter-t hogy stabilan tudjam használni 2.8v-4.2 v között az eszközt?
Ugye ennek a konverternek a VIN lábához megy az aksi, és a csatlakozó ahová csatlakozik majd a TP4056?
Valahogy így?
[link] -
Janos250
őstag
"The ESP32 has 4 SPI interfaces. SPI0 is used as a cache controller for accessing the EMIF and SPI1 is used in master mode only. These two SPI interfaces may be treated as a part of the core system and not be used for general purpose applications. However, SPI2 (called the HSPI from now on) and SPI3 (called the VSPI now onwards) are the interface ports of preference for interfacing to SPI devices."
http://iot-bits.com/esp32/esp32-spi-tutorial-part-1/
Ezt én úgy értelmezem, hogy kettőt lehet használni, de részemről ez csak sejtés.Ez is arra vall, hogy kettő használható:
https://github.com/espressif/arduino-esp32/blob/master/libraries/SPI/examples/SPI_Multiple_Buses/SPI_Multiple_Buses.ino[ Szerkesztve ]
Az amerikaiak $ milliókért fejlesztettek golyóstollat űrbéli használatra. Az oroszok ceruzát használnak. Én meg arduinot.


















 nemsokara haza erek tesztelem a kodot aztan negosztom a tapasztalatom.
nemsokara haza erek tesztelem a kodot aztan negosztom a tapasztalatom.








Új hozzászólás Aktív témák
 ekkold
ekkold- Autós topik látogatók beszélgetős, offolós topikja
- Q, mint Quiet: új változat született a Chieftec Apexből
- Politika
- Gaming notebook topik
- Azonnali VGA-s kérdések órája
- Samsung Galaxy A55 - új év, régi stratégia
- AMD Ryzen 9 / 7 / 5 7***(X) "Zen 4" (AM5)
- Luck Dragon: Asszociációs játék. :)
- Mikrokontrollerek Arduino környezetben (programozás, építés, tippek)
- Hálózati / IP kamera
- További aktív témák...

Állásajánlatok

Cég: Ozeki Kft.
Város: Debrecen

Cég: Ozeki Kft.
Város: Debrecen