-

GAMEPOD.hu
Arduino hardverrel és szoftverrel foglakozó téma. Minden mikrovezérlő ami arduinoval programozható, és minden arduino program, board, és hardverrel kapcsolatos kérdések helye.

Új hozzászólás Aktív témák
-

JoeYi
őstag
sziasztok
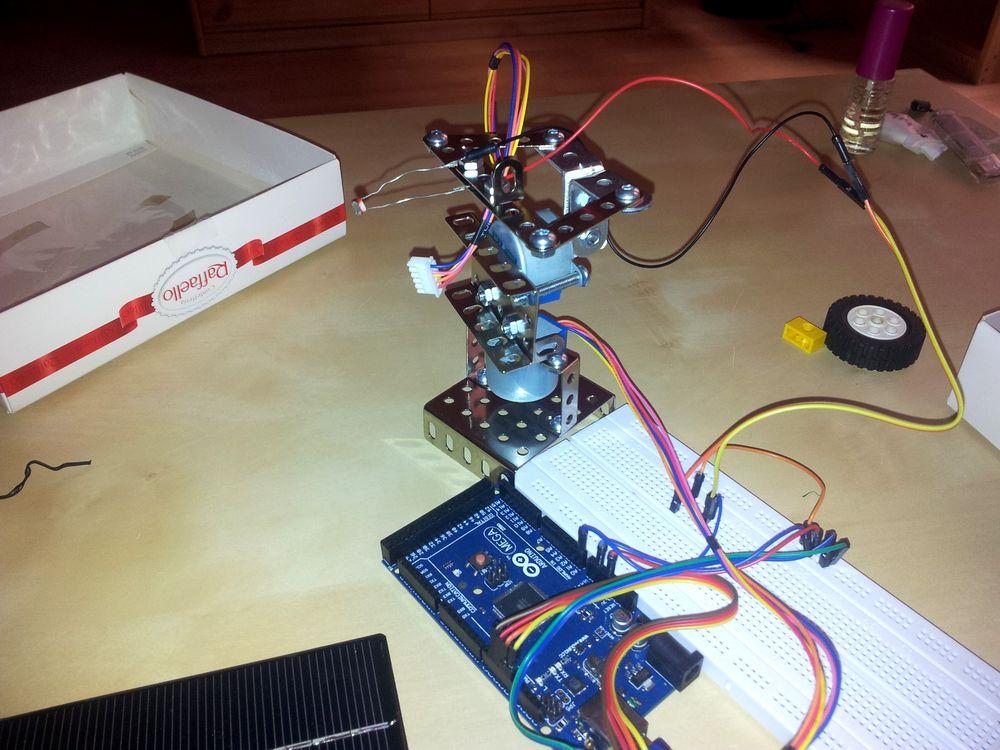
csatlakozok a témához. Én egy napelem alapú projektbe vágtam. A technika lényege az lesz hogy egy napelemet mindig a legerősebb fényforrás felé fordítson a legideálisabb szögbe, ezzel maximalizálva teljesítményt. Gyakorlatilag egy napraforgó.
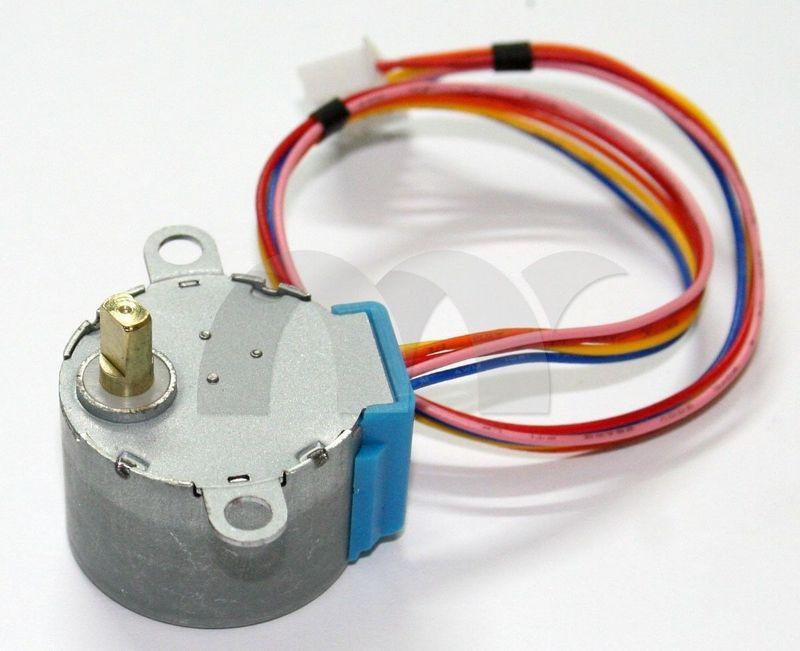
A projekt szoftveres része 70%-os állapotban van, a hardveres része volt megakadva. Korábban lego-ból álltam neki, de az egyszerűen gyenge ilyen célra, nyeklik/szétesik/törik. Aztán beszereztem egy fém építőjátékot és abból kezdtem építkezni. Most így áll:
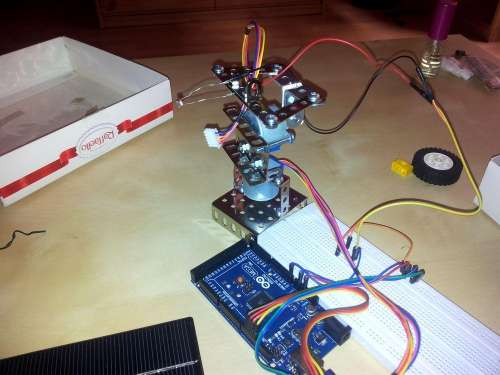
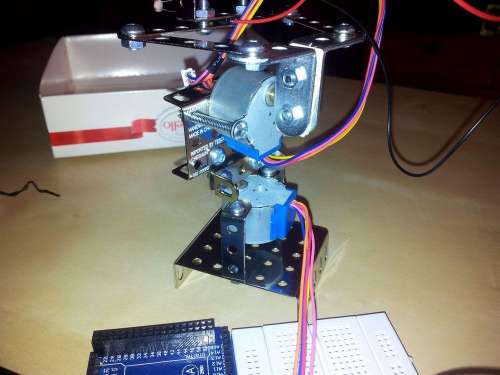
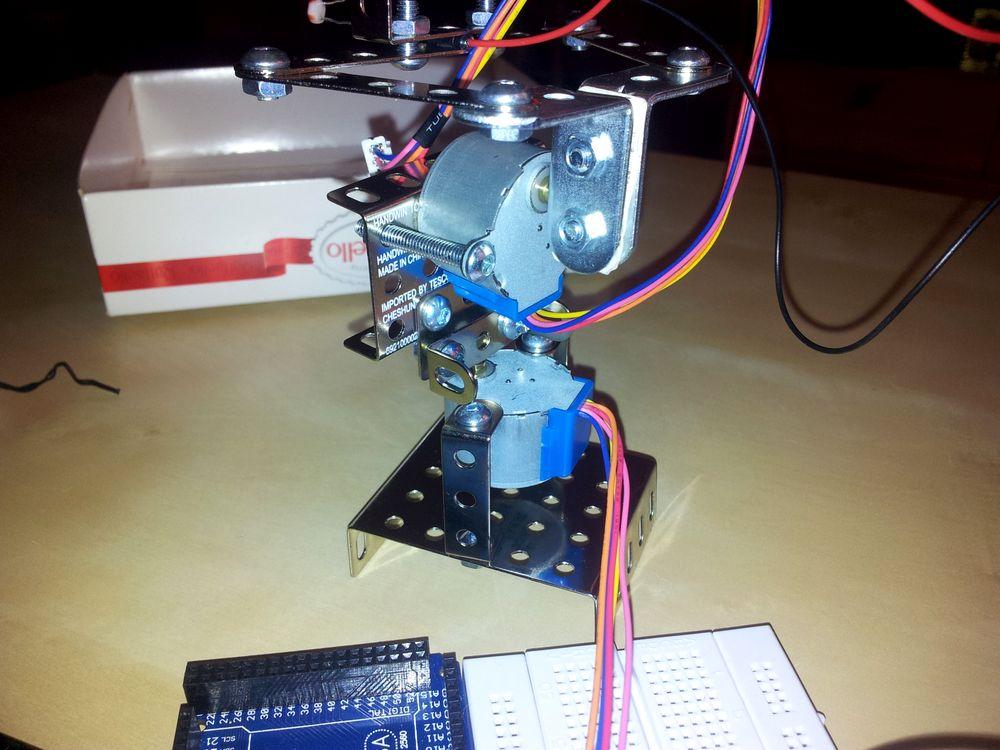
Alapvetően jó is lenne, de nem sikerült rendesen megfogatni a léptető motorok tengelyét.
A kérdésem hozzátok: tudtok-e kifejezetten ilyen motorhoz való kiegészítőket, amik pontosan passzolnak, jól megszorulnak a tengelyén?Köszi ha van ötletetek.
[ Szerkesztve ]
-
#14
JoeYi
őstag
krisztianAMG
#13
JoeYi
őstag
válasz
 krisztianAMG
#13
üzenetére
krisztianAMG
#13
üzenetére
pár méter még nem oszt nem szoroz szerintem. A vezeték ellenállása növekszik a hosszal, meg zajokat vehetne fel, de nem hiszem a hogy a te esetedben ilyesmivel kellene számolni
-
#17
JoeYi
őstag
krisztianAMG
#15
JoeYi
őstag
válasz
krisztianAMG
#15
üzenetére
nekem továbbra is a #10-es hsz-ben látható projekt van folyamatban. Alkatrész problémáim vannak jelenleg, illetve a kábelek is nyűgösek két 360 fokban forgó motornál. Szoftver már ok, tökéletesen belövi hol nap

-
JoeYi
őstag
a példádban az int led = 9; ugyanúgy változó mint a többi a felsorolásban. Csak olvashatóbb lesz tőle a kód hogy nem azt látod hogy pinMode(9, OUTPUT); hanem hogy pinMode(led, OUTPUT);. Plusz amikor megváltoztatnád hogy melyik lábra van kötve a led akkor elég egy helyen átírnod ezt a változót (mert ugye több helyen is hivatkozhatsz a led-re, míg ha a led helyett minden egyes esetben leírnád hogy 9, akkor szopóroller lenne végigkutatni a kódot)
Az hogy a setupban deklarál vagy a loopban: ugye amit a loopban deklarálsz az minden ciklusban beállítódik a loop elején leírt értékre pl, de amit a setupban deklarálsz az ott beállítódok és ha csak nem írod át az értékét a loopban akkor a futás alatt végig annyi marad. Mondjuk ha a loopban is csak egyszer állítja be és többször nem nyúl hozzá akkor tényleg nem logikus oda rakni (bár nem ástam magam bele de vszinű erőforrás igényesebb)
-
#27
JoeYi
őstag
DrojDtroll
#26
JoeYi
őstag
válasz
 DrojDtroll
#26
üzenetére
DrojDtroll
#26
üzenetére
ha jól látom a lényege hogy egy motor tekeri a fókuszállítót. Ezt meglehet csinálni, csak rf kiegészítők kellenek, meg egy motor vezérlő elektronika: [link]
-
#29
JoeYi
őstag
DrojDtroll
#28
JoeYi
őstag
válasz
DrojDtroll
#28
üzenetére
én ilyet használok: [link] de másfélék is vannak
-
#44
JoeYi
őstag
DrojDtroll
#43
JoeYi
őstag
válasz
DrojDtroll
#43
üzenetére
még nem, de nincs elméleti akadálya. Pl kábelen: [link]
drótnélkül meg mégegyszerűbb lehet. Wifi/bluetooth mind-mind szabványos, rf-nek is működnie kellene
-
#47
JoeYi
őstag
DrojDtroll
#46
JoeYi
őstag
válasz
DrojDtroll
#46
üzenetére
hát ez mondjuk már nem arduino-s téma, de kódrészlet és hardver speckó nélkül nehéz bármit mondani. Léptető motorból is többféle megoldás létezik, lehet nem a neki megfelelő módon vezérled.
A rezgés kilövésére a gyorsmegoldás az lehet hogy minden jelszintet 0-ra állítasz ha elforgattad a jó irányba. Mondjuk a motor vezérlő még így is rezegtetheti. Másik próba az lehet hogy léptetsz vele egyenként akkor van-e olyan állapot ahol nem rezeg (lehet eltudod forgatni olyan helyzetbe ami nem számít stabil állapotnak és ezért rezeg)
Én egyébként nem tapasztaltam ilyet a saját projektemben.
-
#54
JoeYi
őstag
DrojDtroll
#53
JoeYi
őstag
válasz
DrojDtroll
#53
üzenetére
én beszoktam röffenteni akksiról, de csak percekre, úgyhogy nincs statisztikai adatom








Új hozzászólás Aktív témák
 ekkold
ekkold
- ZOTAC GeForce GTX 1080 AMP Edition 8GB GDDR5X 256bit
- Filmes gép gyűjtemény
- Nikon D5000 + AF-S DX NIKKOR 18-105 mm
- Bontatlan Seagate & Western Digital HDD-k 3TB - 12TB -ig - Számla + Garancia, Ár alatt! BeszámítOK!
- DJI Mini 4 pro FMC drón - 3 akku, RC2 táv, 2 táska, Filterek, 2025. decemberig garancia, DJI Care